指令并行化
编译器将视频算法的高级实现转换为低级机器指令。但是,有些指令并不依赖于先前的指令,因此,可以安排无依赖相关性的指令同时执行。 因为可以并行评估指令,因此指令之间的潜在重叠构成了指令并行化的基础。例如,考虑如下的代码:
R4 = R1 + R2
R5 = R1 – R3
R6 = R4 + R5
R7 = R4 – R5
在如上的例子中,指令1和2之间或指令3和4之间没有依赖性,但是指令3和4取决于指令1和2的完成。因此,指令1和2以及指令3和4可以并行执行。通常基于编译器的优化和硬件技术来实现指令的并行化。但是,不确定的指令(indefinite instruction)的并行化是不可能的。并行化通常受数据依赖性,过程依赖性和资源冲突的限制。
精简指令集计算机(RISC)处理器中的指令有四个阶段可以重叠,以实现每个周期接近一条指令的平均性能。这些阶段是:指令获取,解码,执行和结果写回。通常同时获取和解码两个指令和,但是如果指令对指令具有写后读取依赖性,则的执行阶段必须等待直到对A的写入完成。因此,在一次执行一条指令的标量处理器中,每个周期不能实现一条以上的指令。但是,超标量处理器利用指令并行化来一次执行多个不相关的指令。例如,和可以一起执行。在这些处理器中,硬件用于检测并并行执行独立指令。
作为超标量处理器的替代方法,超长指令字(VLIW)处理器体系结构利用了指令并行化的优势,并允许程序显式指定要并行执行的指令。这些架构采用积极的编译器,可以在每个周期的一个VLIW中调度多个操作。在这样的平台上,编译器负责查找和调度并行指令。在实用的VLIW处理器(如Equator BSP-15)中,集成的缓存很小——32KB的数据缓存和32 KB的指令缓存通常作为处理器内核和内存之间的桥接(bridges)。连续传输数据非常重要,这样就可以避免等待时间。
为了更好地理解如何在视频编码中利用指令并行性,考虑在VLIW平台上实现视频编码器的示例1。图5-9给出了编码系统的通用结构的框图。
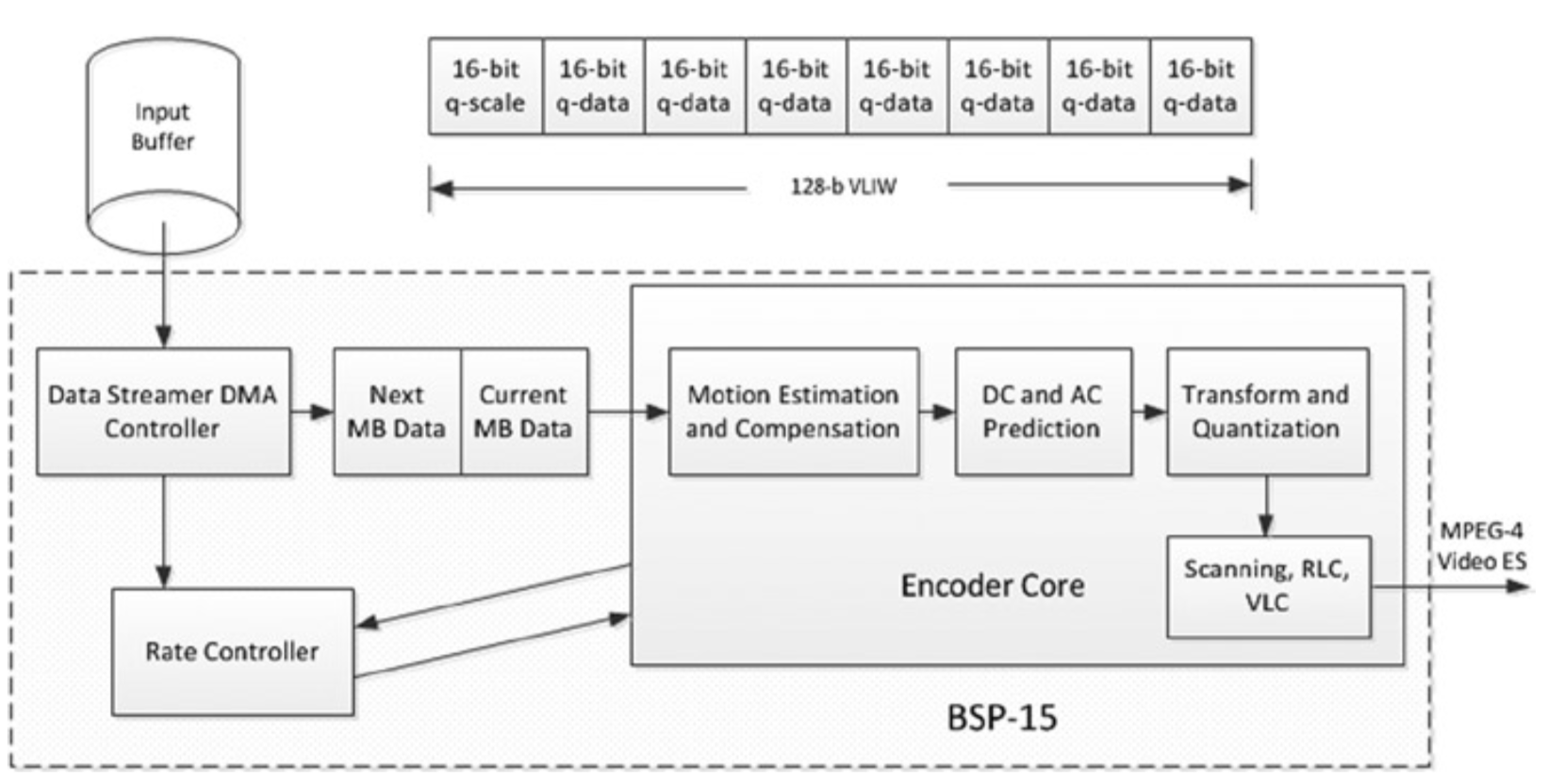 图5-9. VLIW平台上的视频编码器的框图
图5-9. VLIW平台上的视频编码器的框图
图5-9中,宏块以流水线方式处理,同时它们在编码器核心的各个流水线级中经历不同的编码任务。DMA(direct memory access)控制器(通常称为数据流处理器)有助于预取必要的数据。使用双重缓冲技术来连续提供流水线级。该技术以交替方式使用两个缓冲区——当主动使用一个缓冲区中的数据时,下一组数据将加载到第二个缓冲区中。处理活动缓冲区的数据后,第二个缓冲区将成为新的活动缓冲区,并开始对其数据进行处理,而数据处理完毕的缓冲区则将被新数据重新填充。这种设计有助于避免可能存在的性能瓶颈。
需要特别注意,把适当的数据存储到缓存中非常重要,以便可以最大化地利用数据高速缓存和指令高速缓存。为了最大程度地避免缓存未命中的情况,流水线中每个阶段的指令必须满足指令高速缓存的要求,而数据必须满足数据高速缓存的要求。可以重新安排程序,以便编译器可以生成满足指令高速缓存要求的指令。同样,仔细考虑数据预取将保持数据高速缓存处于满额的状态。例如,可以以某种方式存储量化的DCT系数,以帮助某些帧内预测模式下的数据预取,此时,在给定时间内仅需要七个系数(从上一行或从左列)。系数具有(-2048,2047)的动态范围,每个系数需要13 bits,但一般用16位有符号实体表示。七个这样的系数将适合于两个64位寄存器,其中一个16位插槽不能占用。注意,可以将与该流水线级相关的16位元素(例如量化器缩放比例或DC缩放比例)与量化系数打包在一起,以填充寄存器中的空闲插槽,从而实现更好的缓存利用率。
1. S. M. Akramullah, R. Giduthuri, and G. Rajan, “MPEG-4 Advanced Simple Profile Video Encoding on an Embedded Multimedia System. ↩